
Ansprechpartner
Roboterbasierte Messtechnik
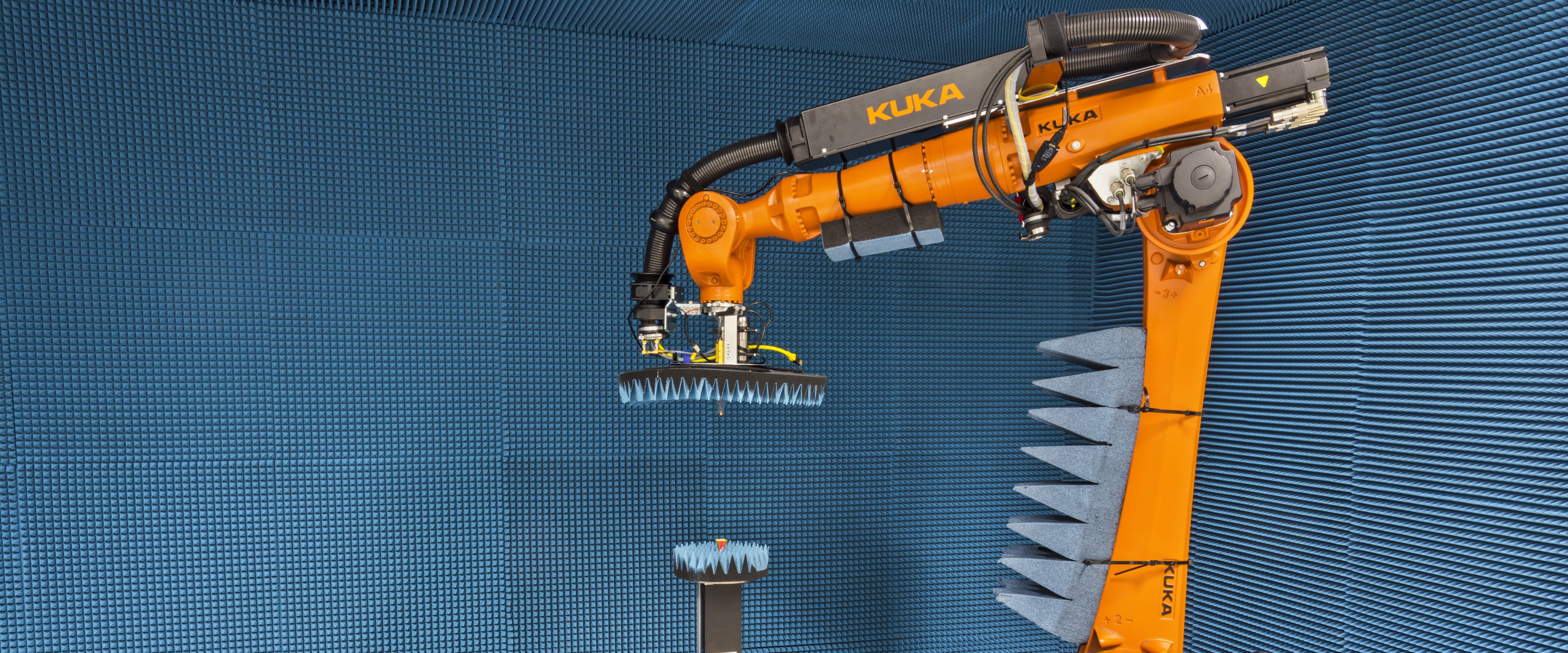
Das Institut für Hochfrequenztechnik betreibt einen roboterbasierten Messaufbau zur Durchführung von Antennen- und Radarmessungen im mmWellen-Bereich. Durch den Einsatz eines industriellen Roboterarms in Kombination mit zwei Zusatzachsen können sowohl planare, zylindrische, sphärische als auch völlig unregelmäßige Abtastgitter realisiert werden. Der modulare Aufbau mittels Mischermodulen ermöglicht zudem eine einfache Anpassung an den gewünschten Frequenzbereich.
Flexibilität roboterbasierter Systemen bei Antennenmessungen
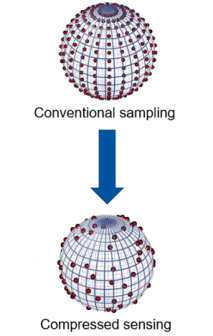
Die sphärische Nahfeldmesstechnik gilt als eine der genauesten Methoden zur Bestimmung des Abstrahlverhaltens einer Antenne. Allerdings erfordert diese Methode, dass die Abtastpunkte auf einer möglichst vollständigen Sphäre, welche die zu testende Antenne umgibt, erhoben werden. Insbesondere bei höheren Frequenzen, welche ein dichtes Abtastgitter erfordern, wird dabei eine große Menge teilweise redundanter Daten erfasst, was sich sowohl negativ auf die Messdauer als auch auf die Berechnungskomplexität auswirkt.
Auf Compressed-Sensing basierende Verfahren erlauben es die Anzahl der benötigten Abtastpunkte und damit die Messdauer erheblich zu reduzieren, erfordern jedoch komplexere Messabläufe. Diese können mit herkömmlichen Positionierungssystemen, welche oftmals aus zwei kombinierten Rotationsachsen bestehen, nur ineffizient abgebildet werden. Robotergestützte Messsysteme hingegen sind nicht an planare oder sphärische Messgeometrien gebunden und können so die gewünschten und scheinbar willkürlich verteilten Abtastpunkte auf flexiblen und möglichst kurzen Bewegungsbahnen erreichen.
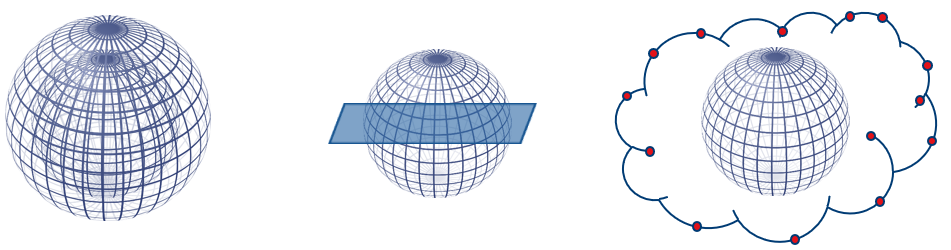
Die Flexibilität roboterbasierter Messsysteme bietet auch im Bereich der Systemmesstechnik und des Over-the-Air-Testings Vorteile. Die meisten aktiven Systeme, wie WLAN-Router, Mobiltelefone oder komplexe Radarsysteme, erlauben es typischerweise nicht ein Referenzsignal, welches für die Messung erforderlich ist, einzuspeisen. Dementsprechend fehlt bei derartigen Messung die Phasenbeziehung zwischen den einzelnen Messpunkten, welche für die Berechnung des Abstrahlverhaltens im Fernfeld jedoch erforderlich ist. Allerdings existieren verschiedene Verfahren zur Rekonstruktion der Phase. Dazu werden typischerweise verschiedene Messgeometrien kombiniert, zum Beispiel mehrere Sphären oder Sphären und Ebenen, wodurch die Phase des Signals aus den bekannten Messpositionen geschätzt werden kann. Auch nicht-kanonische Freiformmessungen können dabei eingesetzt werden, um eine möglichst präzise Rekonstruktion der Phase zu ermöglichen. Während herkömmliche Messsysteme in der Regel nur für einen Bewegungsablauf optimiert sind, zum Beispiel nur für planare oder nur für sphärische Abtastgitter, erlaubt die Flexibilität eines Roboters die Durchführung aller Messgeometrien. Damit können Umbauarbeiten oder sogar ein Wechsel der Messkammer ausgeschlossen und somit zusätzliche Unsicherheiten im Messvorhaben reduziert werden.