
Ergebnisse und Validierung
Obwohl der Aufbau des roboterbasierten Antennenmesssystems noch nicht abgeschlossen ist, erfolgt eine stetige und schrittweise Evaluation zur Präzision der erhobenen Messdaten. Die meisten Roboter werden zum Einsatz in Produktionsstraßen hinsichtlich einer guten Positionswiederholgenauigkeit (ca. 0,04 mm) optimiert. Im Bereich der Antennenmesstechnik ist jedoch die Absolutgenauigkeit ausschlaggebend, da sich die abzufahrenden Abtastgitter je nach Antenne, Frequenz und Untersuchungsmethode stark unterscheiden. Je nach Roboter liegt die Absolutgenauigkeit jedoch in der Größenordnung von 1-2 mm bzw. mit werksseitiger Kalibration der Absolutgenauigkeit im Bereich von ungefähr 0,5 mm. Insbesondere im Bereich von Millimeterwellen ist daher mit größeren Abweichungen zu rechnen, wenn der Messaufbau nicht präzise eingemessen und untersucht wird.
Vergleichsmessungen im Nahfeld
Antennenmessungen im Nahfeld sind oft das Mittel der Wahl, da die räumlichen Anforderungen minimiert werden und eine Vielzahl von Post-Processing-Methoden zur Nachverarbeitung der Messungen existieren, beispielsweise basierend auf der sphärischen Modenzerlegung. Nichtsdestotrotz wird bei der obligatorischen Transformation ins Fernfeld die Phaseninformation benötigt, welche insbesondere im Millimeterwellenbereich sehr sensitiv gegenüber zahlreichen Messunsicherheiten ist.
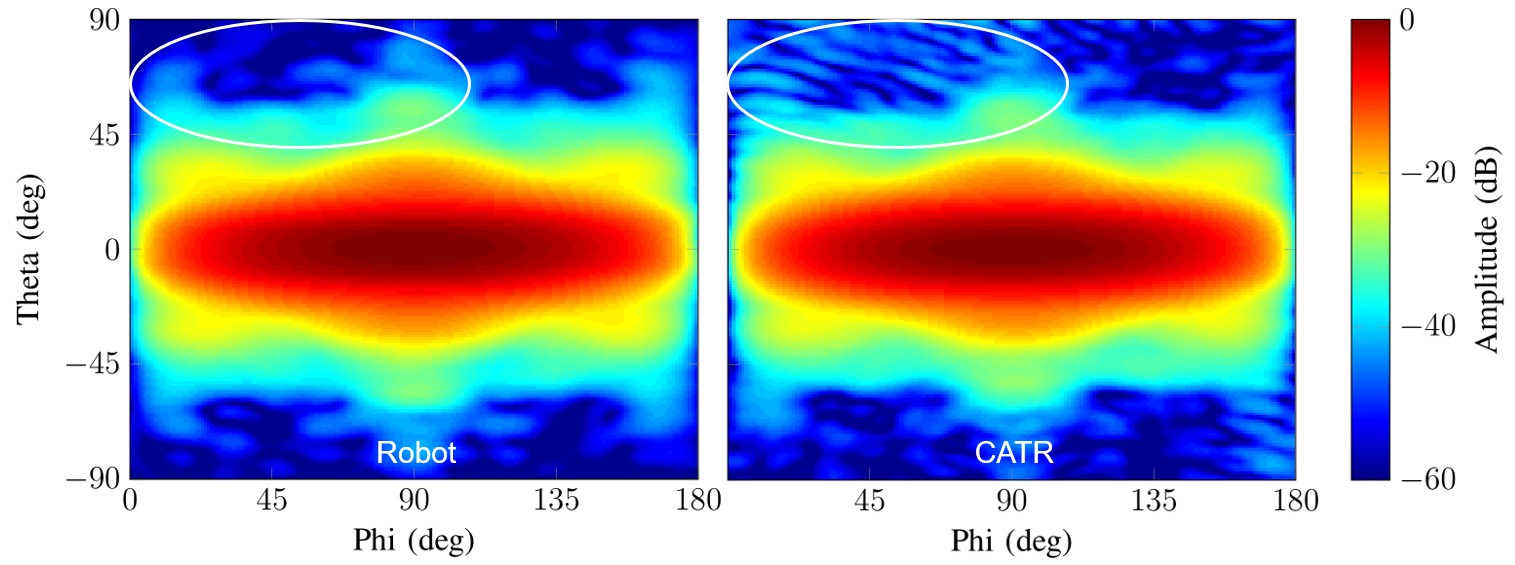
Da die Arbeiten an der Messkammer noch nicht abgeschlossen sind, wird an dieser Stelle nur eine erste vorläufige Vergleichsmessung einer Standardgewinnantenne zur kompakten Fernfeldmesskammer (engl. Compact Antenna Test Range, CATR) des IHFs gegeben. Die qualitative Darstellung zeigt eine ins Fernfeld transformierte Nahfeldmessung des Robotermesssystems im Vergleich zu einer direkten Fernfeldmessung in der CATR bei einer Frequenz von 60 GHz. Es ist deutlich zu sehen, dass eine gute Übereinstimmung mit dem neuen Messsystem erreicht werden kann und das Messergebnis des Roboters in gewissen Winkelbereichen sogar zu besseren Ergebnissen führt (siehe gekennzeichneter Bereich). Im Falle der CATR-Messung ist ein Rippel in den Messergebnissen im Bereich 45° ≤ θ ≤ 90° zu sehen, welcher auf das Spill-Over des Feed-Systems in der CATR zurückzuführen ist, welches sich in diesen Raumkoordinaten befindet. Generell ist jedoch auch zu erkennen, dass die Nahfeldmessungen des Roboters einen größeren Dynamikbereich abdecken, da die Rauscheinflüsse im Randbereich der Messung für |θ| > 60° weniger stark hervortreten.
Vergleichsmessungen im Fernfeld
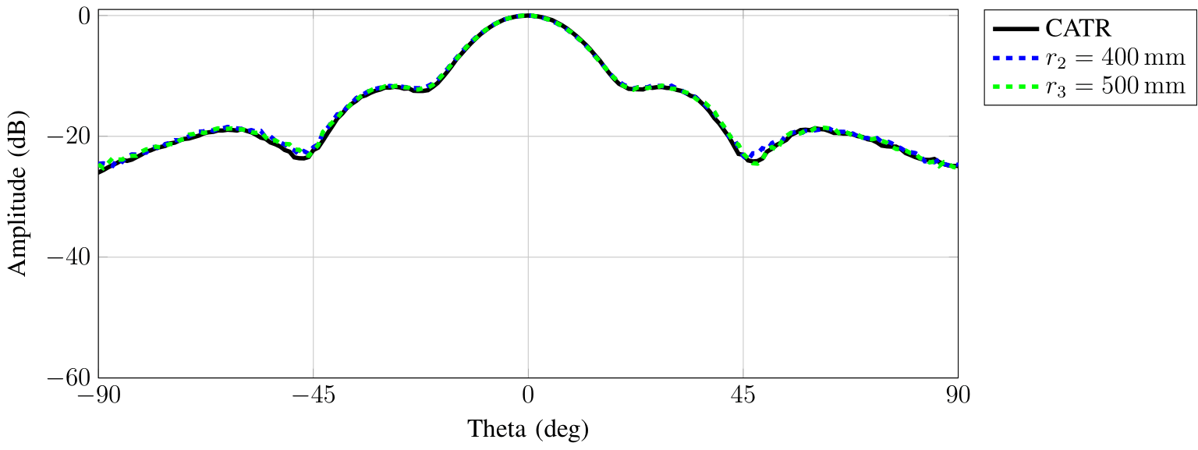
In Abhängigkeit der Dimension der zu testenden Antenne und der Frequenz, können mit dem roboterbasierten Messsystem auch direkte Fernfeldmessungen durchgeführt werden. Der Vorteil von Fernfeldmessungen besteht darin, dass keine berechnungsintensive Transformation ins Fernfeld benötigt wird und die Daten quasi in Echtzeit ausgewertet werden können. Durch den größeren Messradius wird die Messung jedoch auch sensitiver gegenüber Umgebungseinflüssen, wie nachfolgend gut zu erkennen ist. Auch in diesem Fall wird eine Standard-Gewinn-Antenne bei einer Frequenz von 60 GHz betrachtet, allerdings diesmal mittels einer direkten Fernfeldmessung. Wie klar zu erkennen ist, erreichen beide Messsysteme eine gute Übereinstimmung; die Differenz liegt in einer Größenordnung von lediglich -40 dB. Dennoch sind in Bereichen niedriger Signalpegel (|θ| ≈ 45°) die Umgebungseinflüsse des roboterbasierten Messsystems klar zu erkennen, da es hier zu einer Variation je nach gewähltem Messradius kommt und ein Unterschied zur Messung in der CATR sichtbar wird. Da die Messung zu einem Zeitpunkt stattgefunden hat, als die Montage der Absorber noch nicht abgeschlossen war, ist dieser Effekt auf Raumstreuungen zurückzuführen.
Fazit
Obwohl das roboterbasierte Antennenmesssystem noch aktiv weiterentwickelt wird, zeigt der Vergleich, dass bereits im derzeitigen Entwicklungsstadium eine gute Übereinstimmung zu den Referenzmessungen aus der CATR des IHFs erreicht werden kann. Es ist davon auszugehen, dass mit Abschluss der Arbeiten an der Messkammer noch bessere Ergebnisse erzielt werden können, da die zum Fehler beitragenden Raumstreuungen minimiert werden können. Außerdem kann die Messgenauigkeit bei Nahfeldmessungen auch durch die Anwendung einer punktweisen Probenkorrektur unter Berücksichtigung der tatsächlichen Position und Orientierung der Probe-Antenne weiter verbessert werden. Somit eröffnet das roboterbasierte Messsystem große Forschungspotenziale im Bereich der Antennenmesstechnik, beispielsweise im Hinblick auf Compressed Sensing oder phasenlose Messungen.
Weiterführende Informationen
Die hier exemplarisch gezeigten Ergebnisse wurden auf einschlägigen internationalen wissenschaftlichen Konferenzen publiziert. Weiterführende Informationen finden Sie in folgenden Publikationen:
| [1] | R. Moch and D. Heberling, "Robot-based antenna and radar measurement system at the RWTH Aachen University," in Proceedings of the 42nd Antenna Measurement Techniques Association (AMTA) Symposium, 2020. |
| [2] | R. Moch, T. M. Gemmer and D. Heberling, "Amplitude and phase uncertainty analysis due to cable flexing in robot-based measurement systems," Proceedings of the 42nd Antenna Measurement Techniques Association (AMTA) Symposium, 2020. |
| [3] | R. Moch, T. M. Gemmer and D. Heberling, "Spherical antenna measurements performed in a robot-based mm-wave test range," Proceedings of the 15th European Conference on Antennas and Propagation (EuCAP), 2021. |
| [4] | R. Moch and D. Heberling, "Pointwise probe correction applied to a robot-based mm-wave antenna test range," in Proceedings of the 43rd Antenna Measurement Techniques Association (AMTA) Symposium, 2021. |
| [5] | J. Jäger, R. Moch, T. M. Gemmer and D. Heberling, "Development of a motion-capable model for a robot-based antenna measurement system to simulate scattering-induced interference," in Proceedings of the 43rd Antenna Measurement Techniques Association (AMTA) Symposium, 2021. |
| [6] | A. C. Granich, R. Moch, D. Heberling, "System parameter analysis of integrated radar sensor in a controlled test environment utilizing a robot-based measurement system," in Proceedings of the 43rd Antenna Measurement Techniques Association (AMTA) Symposium, 2021. |