
Roboterbasierte Messtechnik

Spezifikationen
| Frequenzbereich | 60 - 90 GHz | |
| Positioniersystem (gemeinsame Kinematik) | Roboter | KUKA KR8-R2010-2
|
| Linearachse (7. Achse) | ROLLON TX100
| |
| Rotationsachse (8. Achse) | DMV140
| |
| Messtrajektorien | Sphärisch | Radius: 100 mm ... 1025 mm |
| Zylindrisch | Radius: 100 mm ... 3700 mm, Höhe: Bis zu 1400 mm | |
| Planar | Inklusive Zusatzachsen: 6000 mm x 6000 mm; Ohne Zusatzachsen: 1400 mm x 1400 mm | |
| Freiform | Kombination obiger Messtrajektorien | |
| Spline-basierte Messung unter Angabe beliebig vieler einzelner Messpunkte | ||
| HF Ausstattung | Rohde & Schwarz ZVA67 als LO- und RF-Quelle sowie IF-Empfänger | |
| LO/IF-Verteileinheit mit rekonfigurierbaren HF-Pfaden (Eigenbau) | ||
| Messdynamik | 80 dB (bei 90 GHz und 100 mm Messradius) | |
| Messkammerdimensionen (L x B x H) | 4,4 m x 2,67 m x 2,20 m | |
| Steuerungssoftware | Eigenentwicklung am IHF speziell angepasst für die Messkammer | |
| Postprocessing | Matlab-Toolbox für Nah- und Fernfeldmessungen inklusive sphärischer Modentransformation | |
| Zusätzliche Messausstattung | Gewinnstandard für 60 - 90 GHz | |
| Bildgebende Radarmessungen | ||
| Aktive Radarsystemmessungen | ||
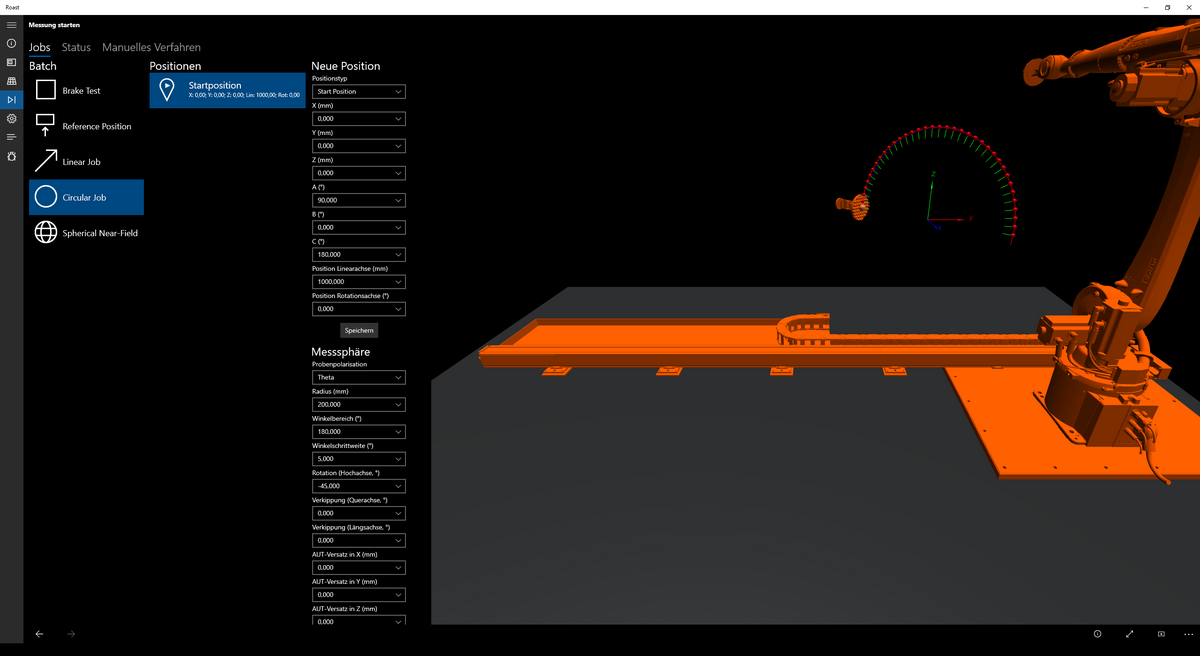
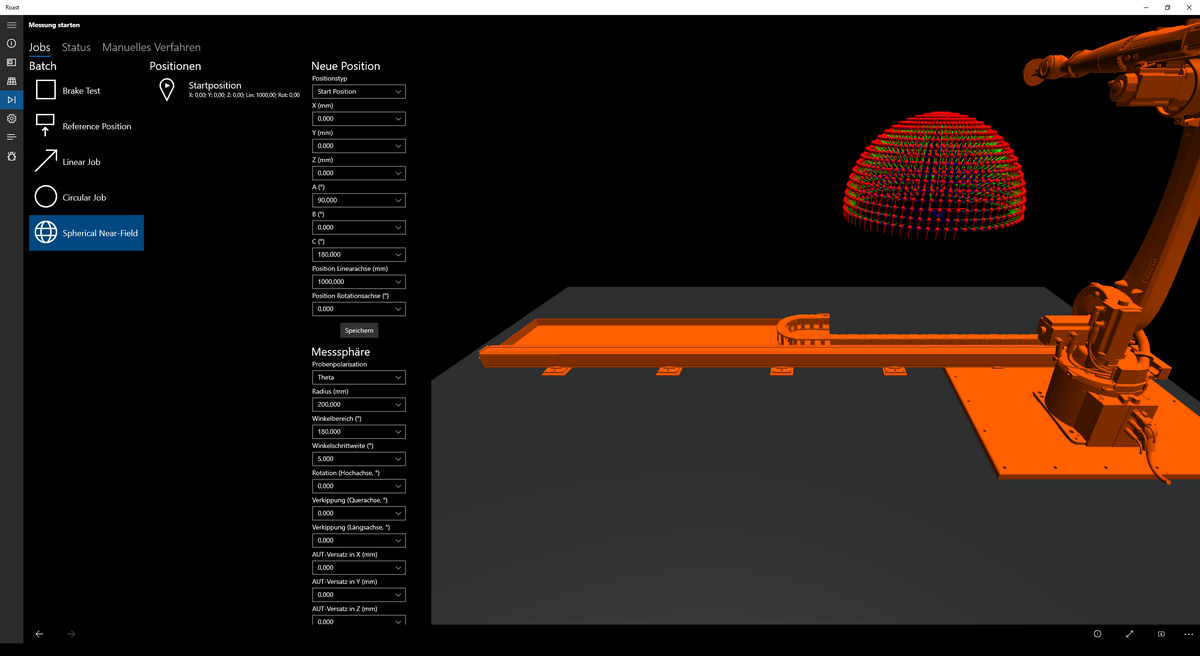
Steuerungssoftware
Die eigens für diese Messkammer am IHF entwickelte Steuerungssoftware erlaubt den komfortablen Betrieb der roboterbasierten Messtechnik. Die integrierte 3D-Darstellung visualisiert eingängig die geplanten Messabläufe und reduziert damit das Risiko fehlerhaft gewählter Messparameter.
Weiterführende Informationen
Weitere Details, Bilder und Videos zur roboterbasierten Messtechnik am IHF finden Sie hier:
Roboterbasierte Messtechnik