
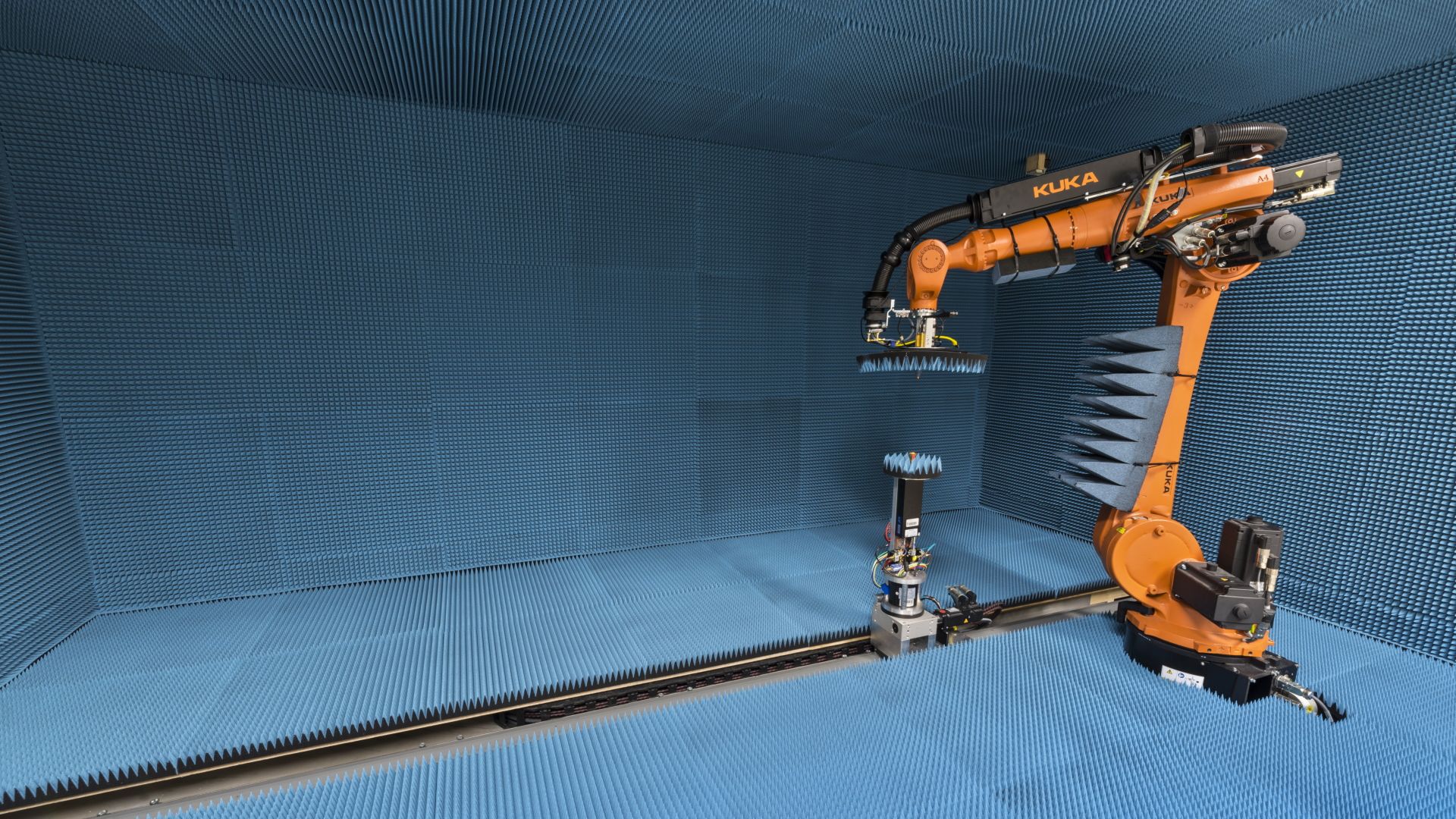
Robot-Based Measurement Technology
Specifications
| Frequency Range | 60 - 90 GHz | |
| Positioning system (common kinematics) | Robot | KUKA KR8-R2010-2
|
| Linear axis (7. Axis) | ROLLON TX100
| |
| Rotation Axis (8. Axis) | DMV140
| |
| Measurement Trajectories | Spherical | Radius: 100 mm ... 1025 mm |
| Cylindrical | Radius: 100 mm ... 3700 mm, Height: up to 1400 mm | |
| Planar | Including additional axes: 6000 mm x 6000 mm; Without additional axes: 1400 mm x 1400 mm | |
| Free-Form | Combination of the above mentioned measurement trajectories | |
| Spline-based measurement with any number of individual sampling points | ||
| RF Instrumentation | Rohde & Schwarz ZVA67 as LO- und RF-Source and IF-Receiver | |
| LO/IF distribution unit with reconfigurable RF paths | ||
| Measurement Dynamic Range | 80 dB (at 90 GHz and 100 mm measurement radius) | |
| Measurement Chamber Dimensions (L x B x H) | 4.4 m x 2.67 m x 2.20 m | |
| Controlling Software | In-house development at IHF specifically customized for the measurement chamber | |
| Post-processing | Matlab toolbox for near- and far-field measurements including spherical mode transformation | |
| Additional Test Equipment | Standard gain antenna for 60 - 90 GHz | |
| Imaging radar measurements | ||
| Active radar system measurements | ||
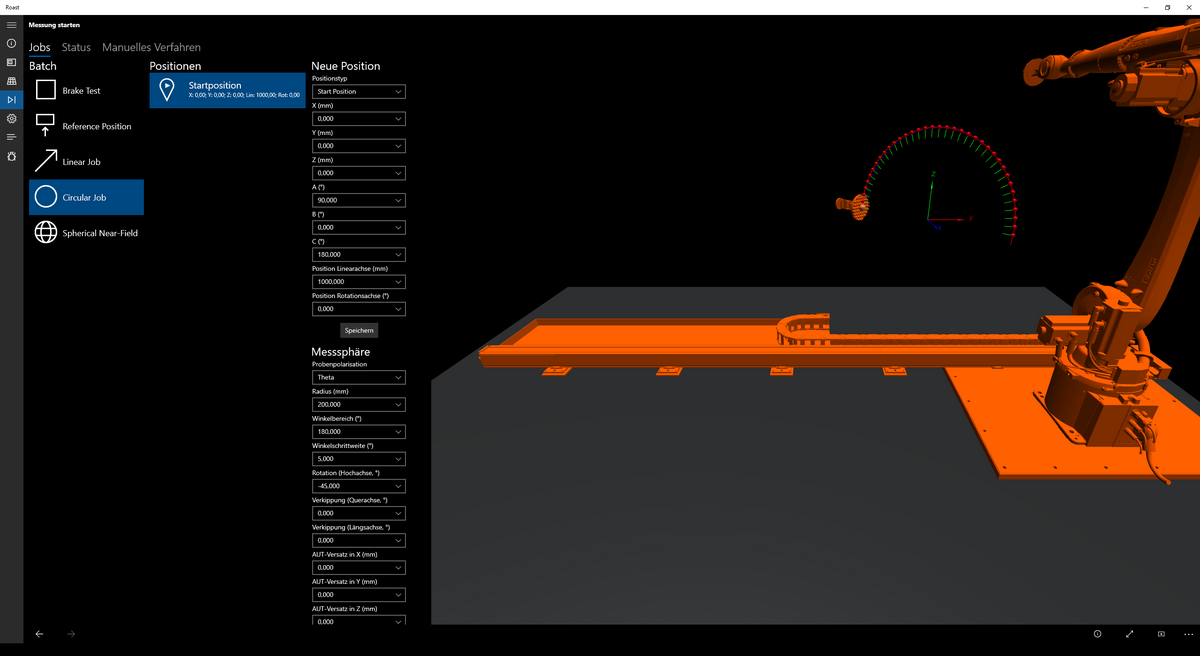
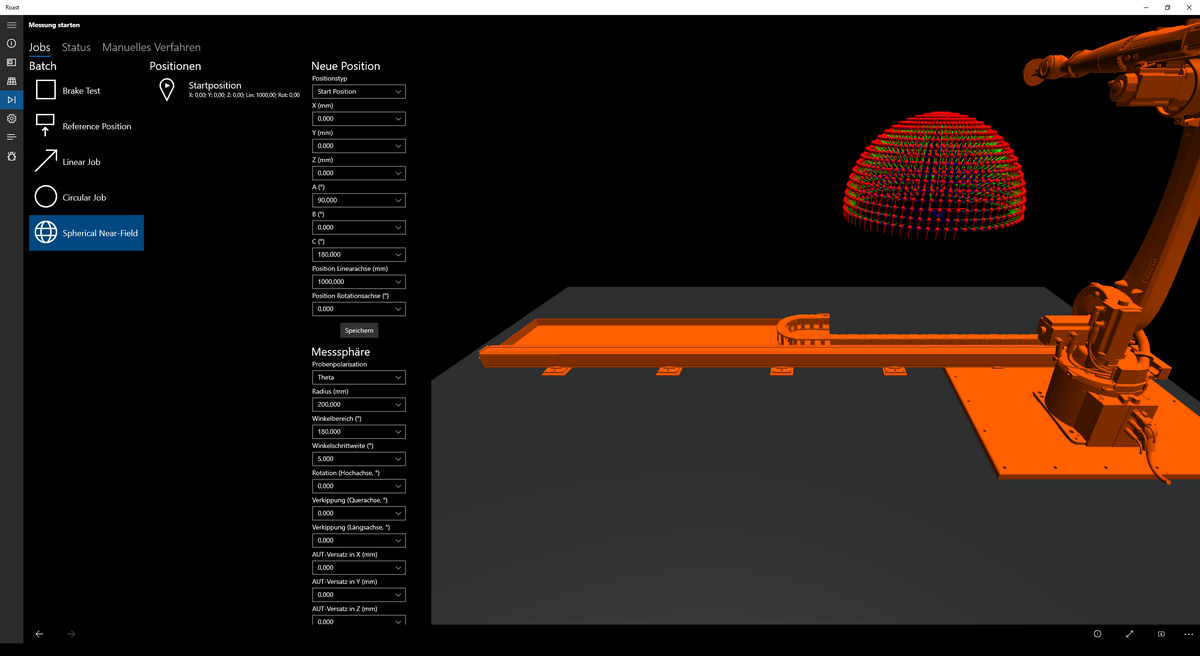
Controlling Software
The control software developed at IHF allows convenient operation of the robot-based measurement technology. The integrated 3D representation visualizes the planned measurement sequences in an intuitive manner and, thus, reduces the risk of misleading measurement parameters.
Further Information
More details, pictures and videos about the robot-based measurement technology at IHF can be found here:
Robot-Based Measurement Technology