
Tomographic 3D Radar Imaging
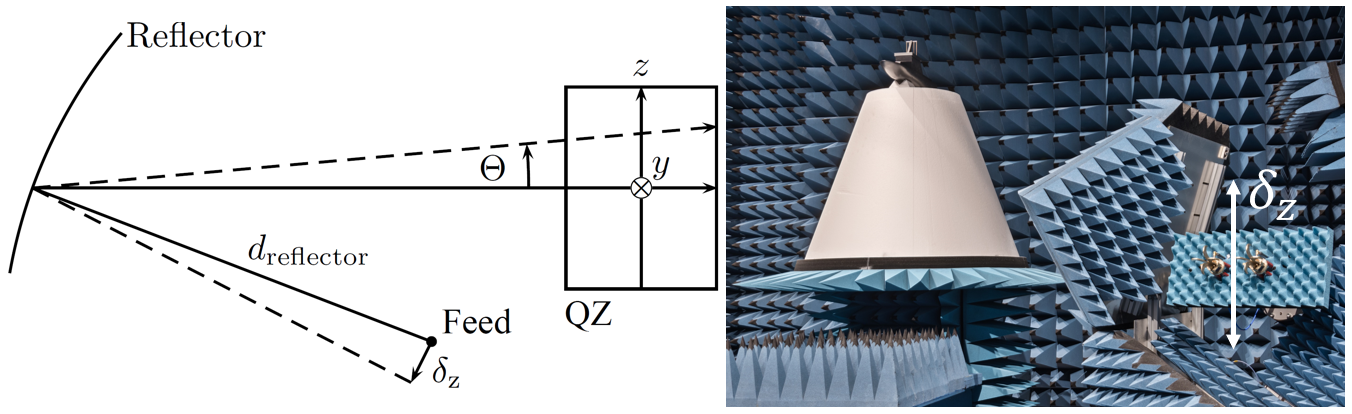
Radar cross-section measurements are an important tool for describing the reflectivity of individual objects. Often, measurements must be employed for this purpose, since analytical models for describing arbitrary objects are lacking. In addition to conventional 2D radar imaging, which spatially resolves scattering centers and, thus, simplifies the interpretation of the reflection mechanisms occurring at the object, 3D radar images can also be generated in the Compact Range of the IHF. For this purpose, the degrees of freedom along frequency and in azimuth are supplemented by a third degree of freedom along elevation. In the IHF's measurement chamber, this can be achieved by moving the transmit and receive antennas of the RCS measurement setup (also called the feed) vertically in elevation, which tilts the plane wave impinging on the object along the elevation axis. The feed position adjustment capability is used to correct for interferences in ordinary compact range antenna measurements, and therefore the travel distances are limited to 30 cm. However, in the case of tomographic radar imaging, the limited linear axes reduce the resolution.
Conventional Methods
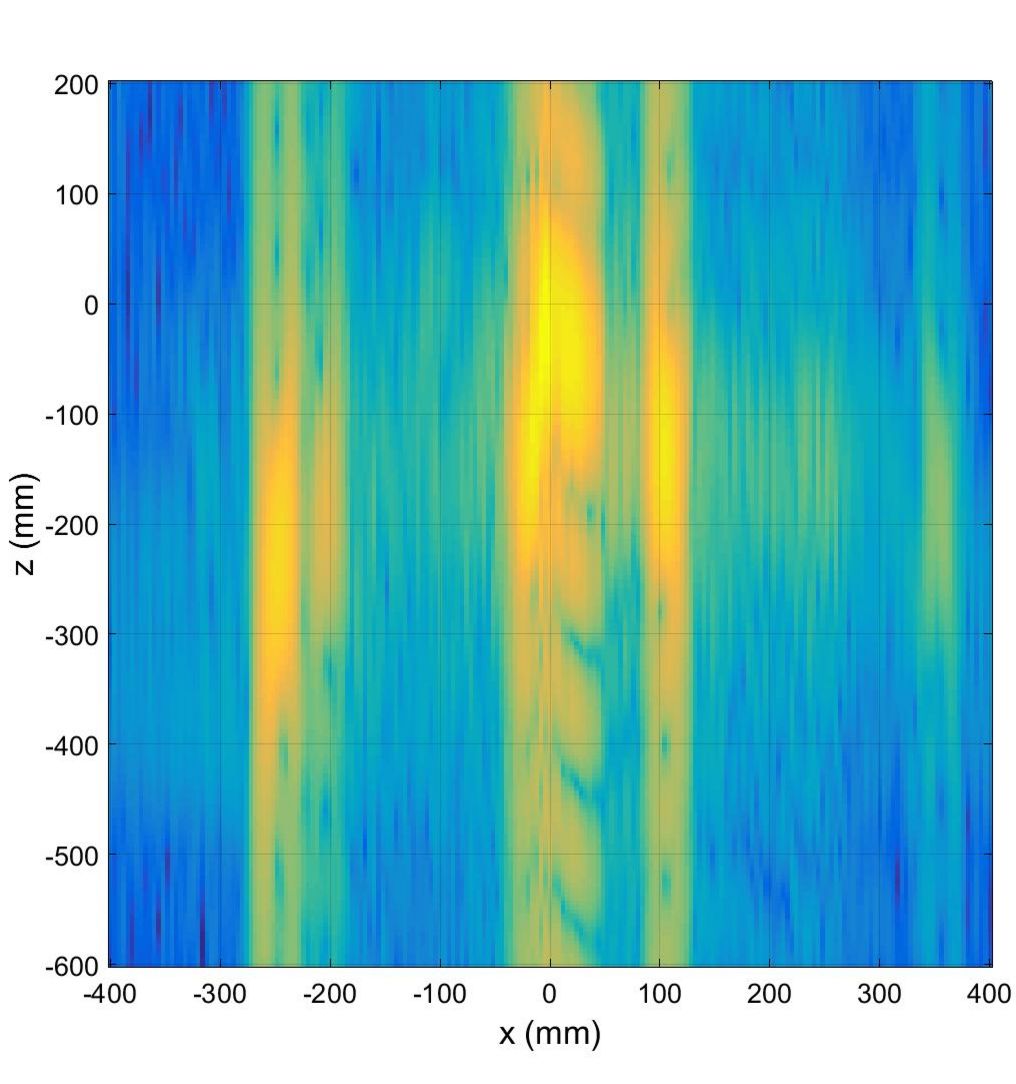
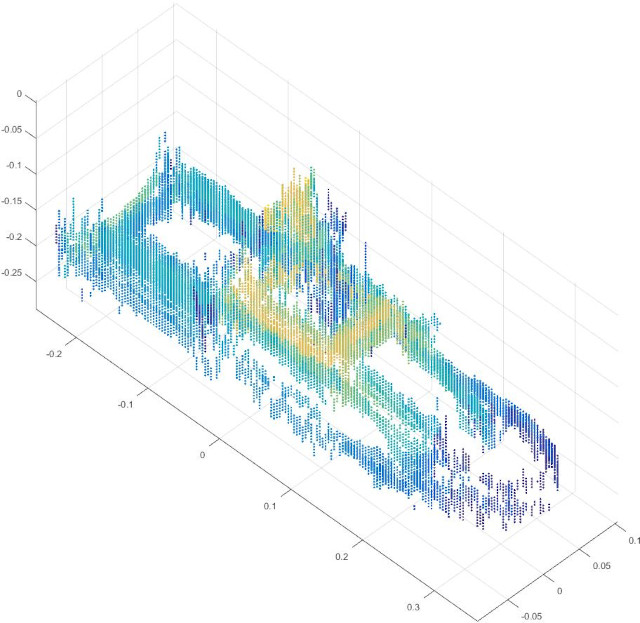
Due to the small displacement paths of the feed in the Compact Range, the plane wave incident on the object of interest can be tilted by approximately ± 3° along the elevation. This small angular range significantly limits the resolution capability along elevation, as shown in the image to the right. It can be clearly seen that the resolution is insufficient using conventional focusing algorithms, for example using the so-called Bartlett beamformer or a Fourier transform. Consequently, the IHF boat is barely recognizable in the shown height spectrum and at best can be distinguished in hull and cabin. However, by applying high-resolution frequency analysis techniques, the resolution can be significantly improved.

High-Resolution Frequency Analysis Methods
High-resolution frequency analysis methods are used in numerous applications, for example to improve image quality in computed tomography or the direction estimation of radar sensors. In the automotive sector in particular, the most precise angle estimation possible is essential for environmental detection as part of the development of autonomous driving vehicles.
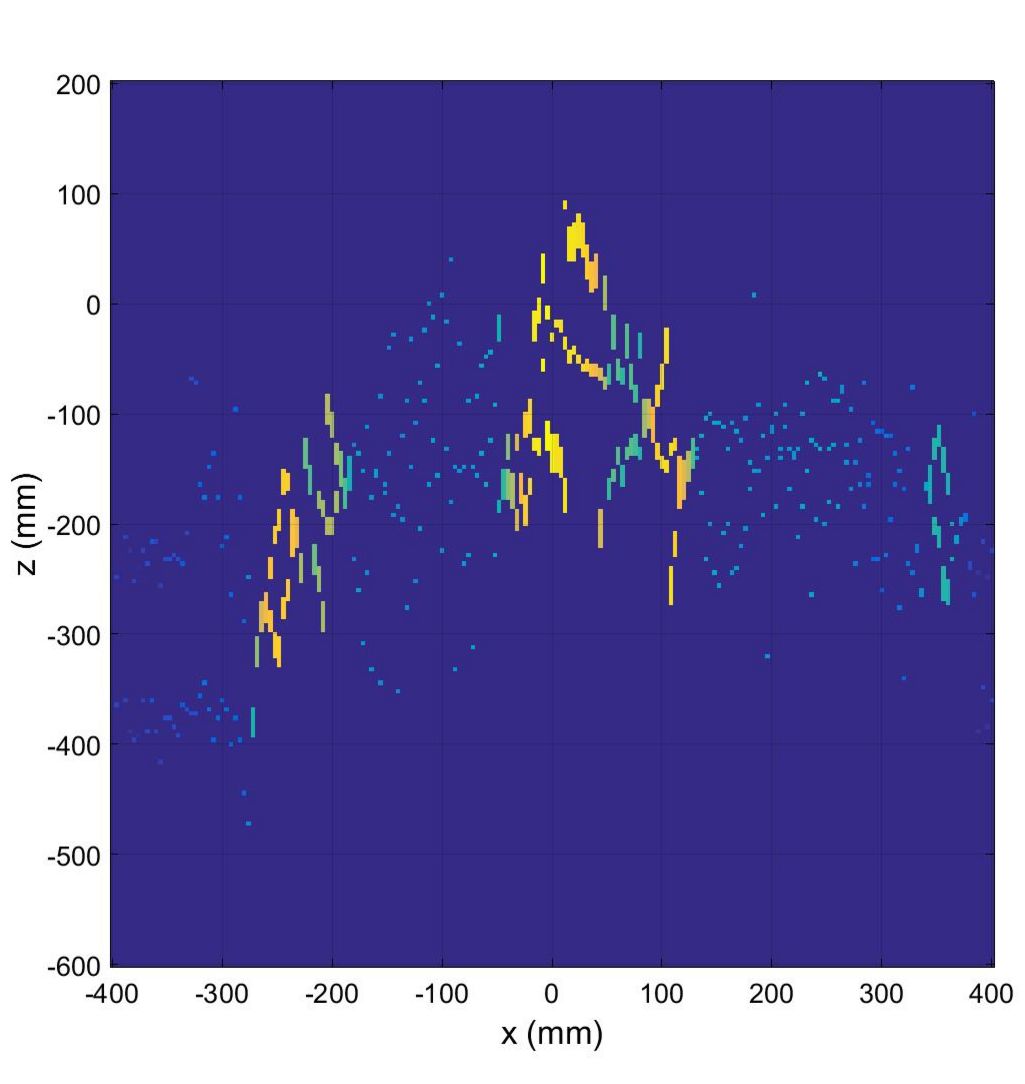
Such methods can also be used in tomographic radar imaging to improve the resolution. The distinctive feature here is that since no temporal variations occur in the shielded measurement chamber, the individual polarimetric components are used to span the signal space. This allows much more precise height estimates, compensating for the angular range along the elevation, which is limited to ± 3°. Compared to elevation estimation based on the Bartlett beamformer, much more precise elevation information can be extracted using, for example, Mutiple Signal Classification (MuSiC) or Deterministic Maximum Likelihood (DML).
3D Radar Imaging
By applying high-resolution frequency analysis techniques, detailed height information can be obtained despite the limited angular range in elevation. The animation shown on the right (click to start) illustrates the principle of tomography by showing the different backscattering intensities of the IHF boat for each elevation section. It can be clearly seen how first the hull and the loading areas and later the driver's cabin or the antenna structure come more into focus according to the respective vertical section.
Based on this, complete 3D radar images of an object can also be generated, as shown for the IHF boat. The respective intensities of the backscattering mechanisms are color-coded and thus allow detailed conclusions to be drawn about the scattering behavior of the object. In addition to the hull of the boat, it can be clearly seen that both the cabin and the antenna structure are particularly reflective.
Thus, high-resolution frequency analysis methods are suitable either for reducing the measurement time, since fewer sections have to be measured along the elevation, or for improving the image quality, if the acquired measurement data are not sufficient (for example, caused by limited movement paths).