
Robot-Based Measurement Technology
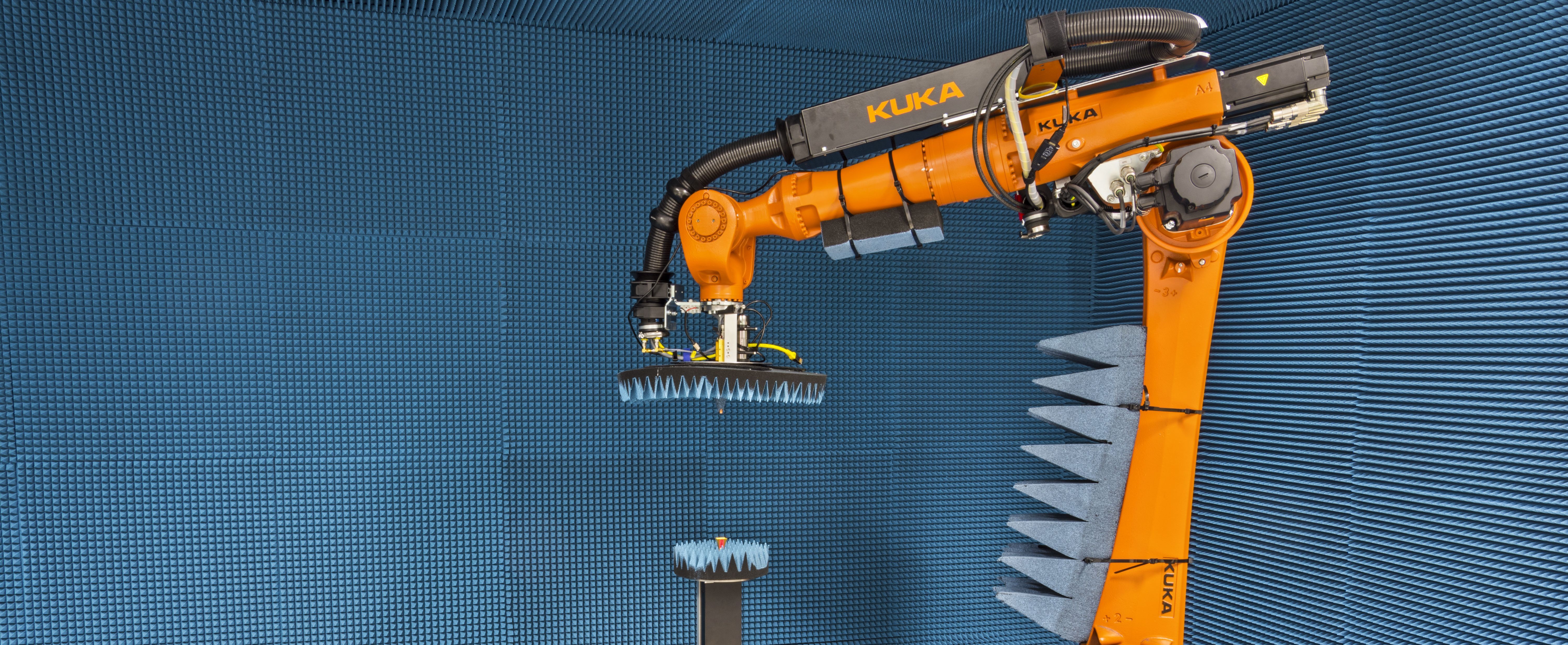
The Institute of High Frequency Technology operates a robot-based measurement setup for performing antenna and radar measurements in the mm-wave range. By using an industrial robot arm in combination with two additional axes, planar, cylindrical, spherical as well as completely irregular sampling grids can be implemented. The modular design based on mixer modules also allows easy adaptation to the desired frequency range.
Flexibility of Robot-Based Systems in Antenna Measurements
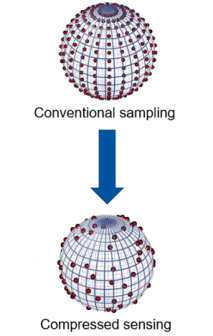
The spherical near-field measurement technique is considered one of the most accurate methods for determining the radiation pattern of an antenna. However, the method requires that a complete sphere around the antenna is always measured. Especially at higher frequencies, which require a dense sampling grid, a large amount of partially redundant data is collected, which greatly increases both, measurement time and computational complexity.
Compressed sensing-based methods can significantly reduce the number of sampling points required and, thus, the measurement duration, but have much more complex measurement trajectories. Conventional positioning systems, which often consist of two combined rotational axes, are not designed for such sampling grids and therefore require inefficient and error-prone workarounds. Robot-based measuring systems, however, are not bound to planar or spherical geometries and can thereby reach the desired and seemingly randomly distributed scanning points on flexible and shortest possible paths.
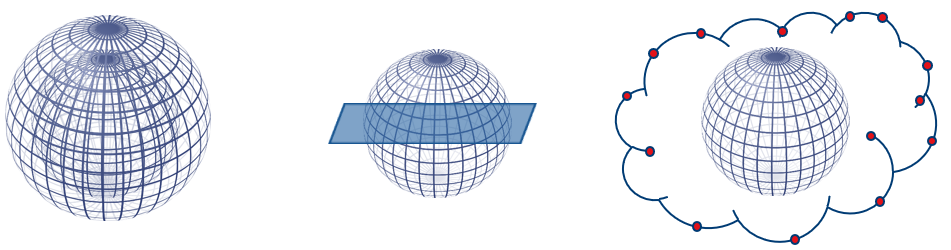
The flexibility of robot-based measurement systems also offers advantages in the field of system measurement technology and over-the-air testing. Most active systems, such as WiFi routers, mobile phones or complex radar systems, typically do not allow to provide a reference signal, which is required for the measurement. Accordingly, such measurements lack the phase relationship between the individual measurement points, which is, however, required for the calculation of the radiation pattern in the far field. However, various methods exist for reconstructing the phase. This typically involves combining different measurement geometries, for example multiple spheres or spheres and planes, which enables to estimate the phase of the signal from the known measurement positions. Also, non-canonical free-form measurements can be used in this process to provide a more accurate reconstruction of the phase. While conventional measurement systems are usually optimized for only one motion sequence, for example only for planar or only for spherical sampling grids, the flexibility of a robot can be utilized to perform all measurement geometries. This avoids modifying or even switching the measurement chamber and, thus, eliminates additional uncertainties in the realization of the measurement project.