
Control Software
Even before the robotic measurement chamber was set up, the development of an extensive software environment was started. This consists of the control software shown on the right as the central interface to the user, but is further complemented by hardware-related control programs in the GatewayUnit and the LO/IF distribution unit. Each of these software components shares a common code base, so that new features can be distributed across all components without any problems.
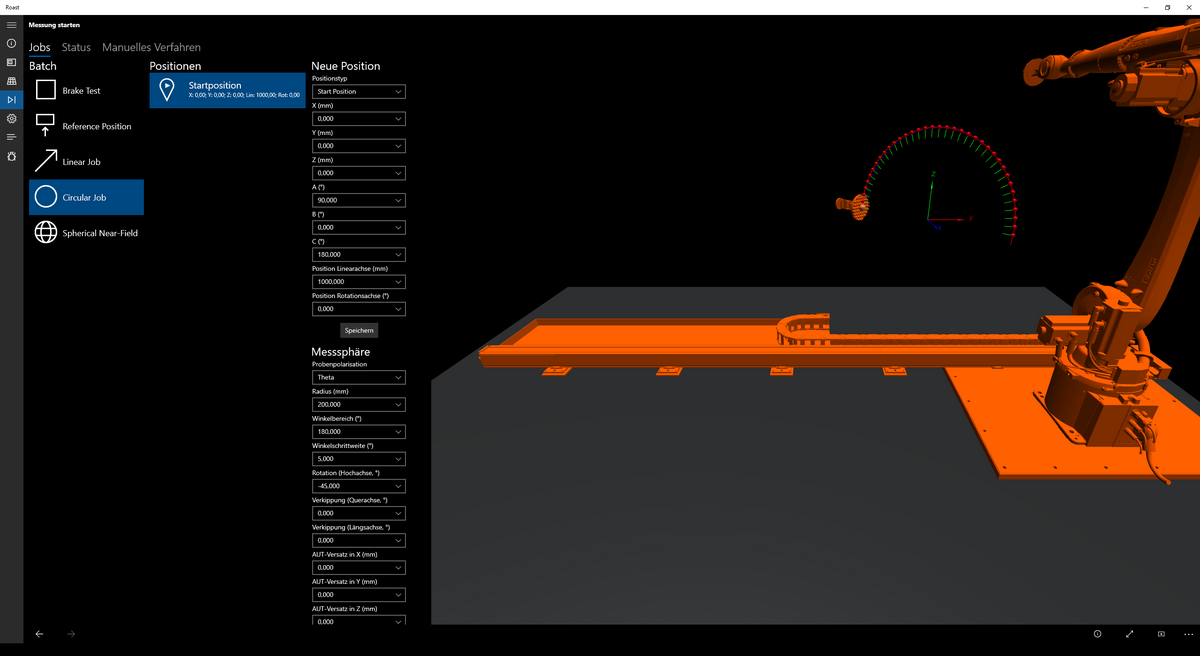
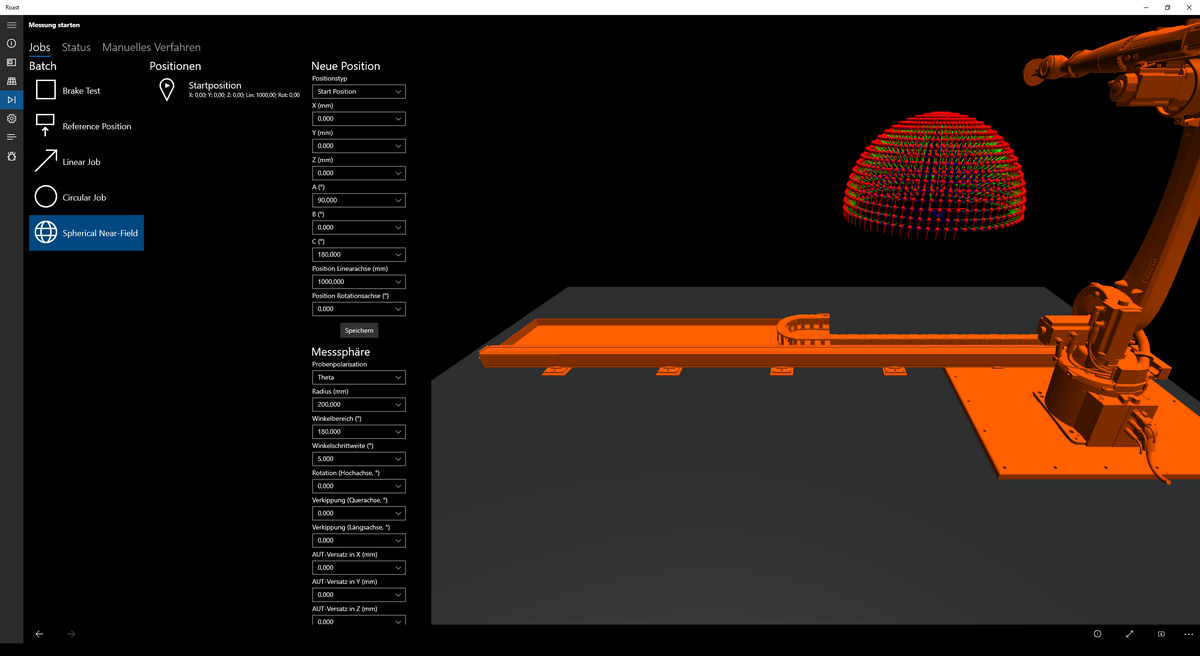
The control software shown on the right abstracts the complex mechanical processes and signal flows from the operator, ensuring safe operation of the measurement chamber at all times. In addition to 3D visualization for planning the measurement sequences, the automation of various internal processes also plays an important role: For example, the system first checks whether the power calibration of the VNA is set correctly before switching on the power supply of the frequency extension modules in the LO/IF distribution unit. The signals digitized in the GatewayUnit are also processed in the control software so that, for example, all trigger signals can be checked for completeness in order to maintain the integrity of the measurement data.
The research data management of the control software also ensures that all essential meta information of the measurement process, as well as the measurement data itself, are stored in a relational SQL database for each measurement performed. In addition, there is a web interface for remote diagnosis of the measurement system as well as for displaying real-time information (status of a measurement, current position and speed of the actuators, ...) or for visualizing the measured raw data. Furthermore, a MATLAB interface was implemented, which enables a seamless transition to the scientific utilization of the collected measurement data.
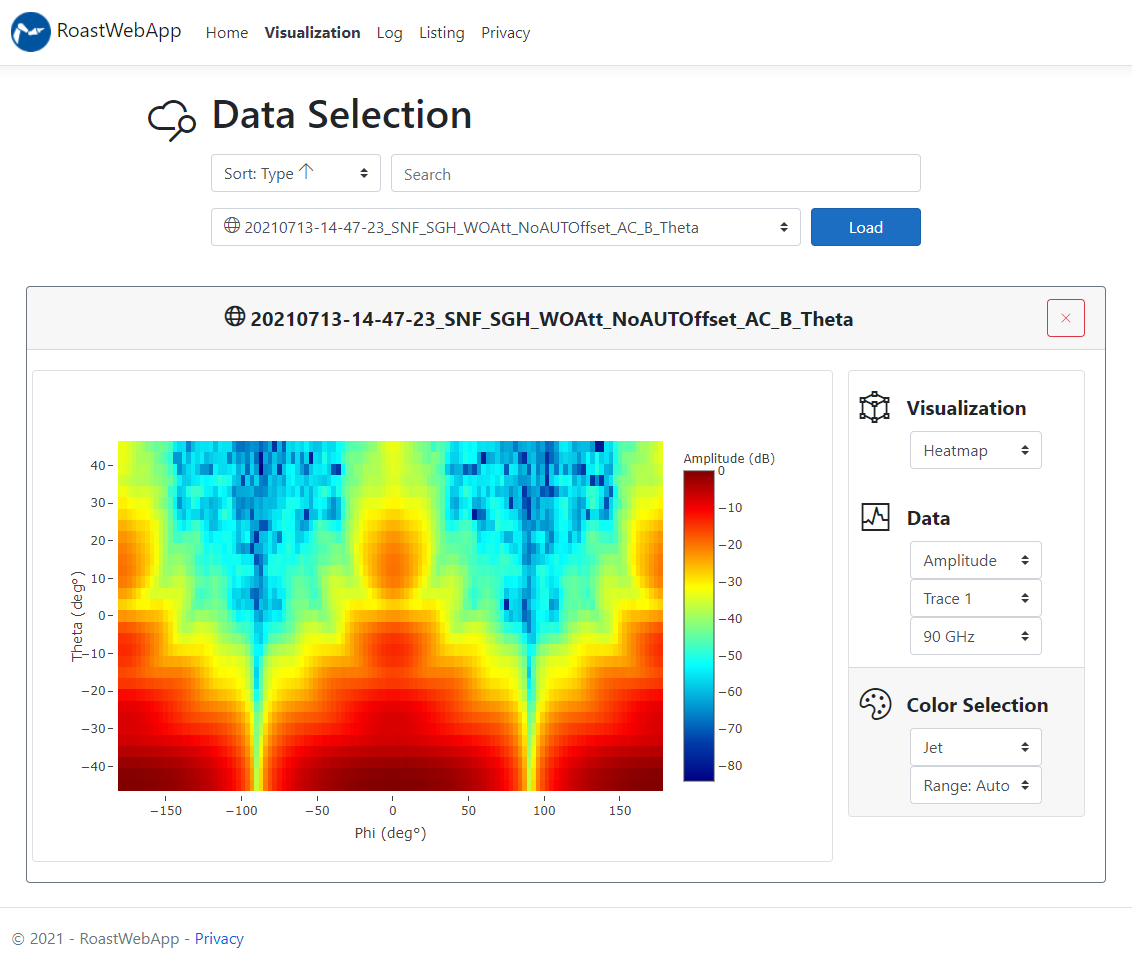
The development of the web interface for remote diagnosis of the robot-based measurement chamber is currently being continued by the mathematical-technical software developers (MATSE) at IHF and is, therefore, regularly expanded with new functions.