
Results and Validation
Although the setup of the robot-based antenna measurement system has not yet been completed, a steady and step-by-step evaluation is being carried out on the precision of the collected measurement data. Most robots are optimized for use in production lines with respect to a good position repeatability (approximately 0.04 mm). In the field of antenna measurement technology, however, absolute accuracy is crucial, since the sampling grids used vary greatly depending on the antenna, the frequency and the testing method. Depending on the robot, the absolute accuracy is in the order of 1-2 mm or, with factory calibration of the absolute accuracy, in the range of about 0.5 mm. Especially in the range of millimeter waves, larger deviations are therefore to be expected if the measurement setup is not precisely calibrated and examined.
Comparative Measurements in the Near Field
Antenna measurements in the near field are often the method of choice, since spatial requirements are minimized and a variety of post-processing methods exist for evaluating the measurements, for example based on spherical mode expansion. Nevertheless, the mandatory transformation to the far field requires the phase information, which is very sensitive to numerous measurement uncertainties, especially in the millimeter-wave range.
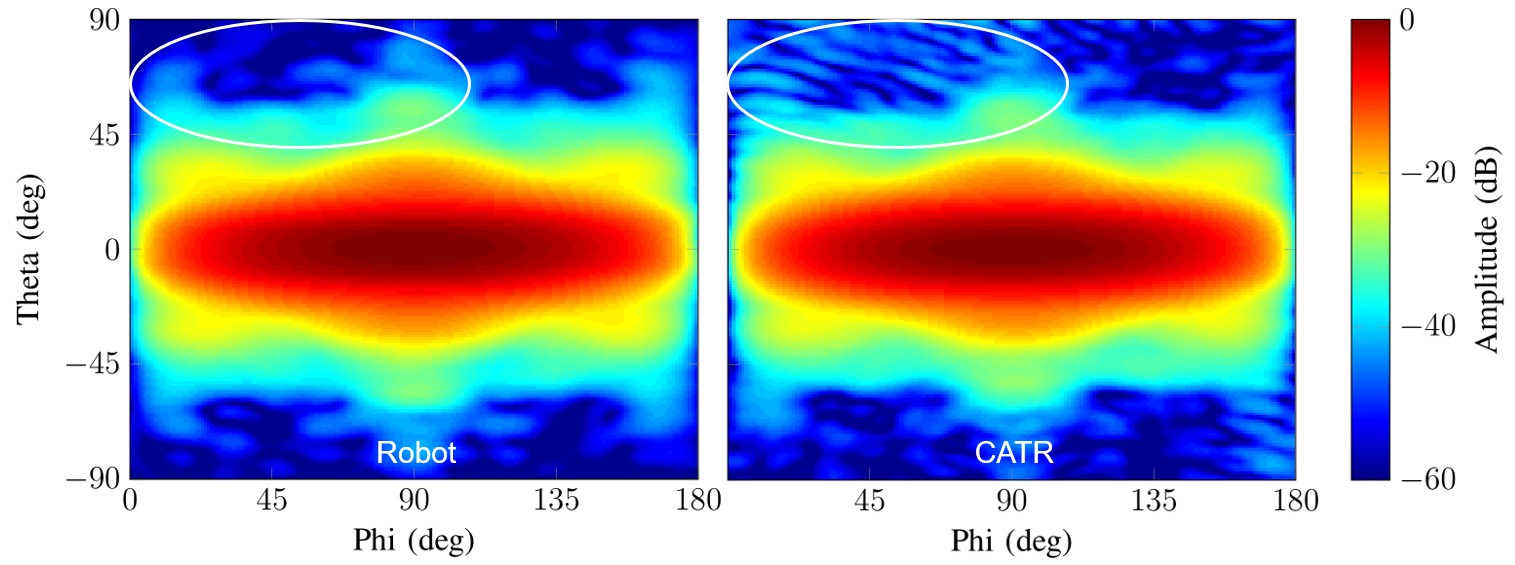
Since the work on the measurement chamber has not yet been completed, only a first preliminary comparison of a standard gain horn antenna to the compact antenna test range (CATR) of the IHF is given here. The qualitative illustration shows a near-field measurement of the robotic measurement system transformed into the far field in comparison with a direct far-field measurement in the CATR at a frequency of 60 GHz. It can be clearly seen that good agreement can be achieved with the new measurement system and that the robot-based approach even leads to better results in certain angular ranges (see marked area). In the case of the CATR measurement, a ripple can be seen in the measurement results in the range of 45° ≤ θ ≤ 90°, which is due to the spill-over of the feed system in the CATR, which is located in these spatial coordinates. In general, however, it can also be seen that the near-field measurements of the robot cover a larger dynamic range, since the noise effects are less prominent in the outer region of the measurement for |θ| > 60°.
Comparative Measurements in the Far Field
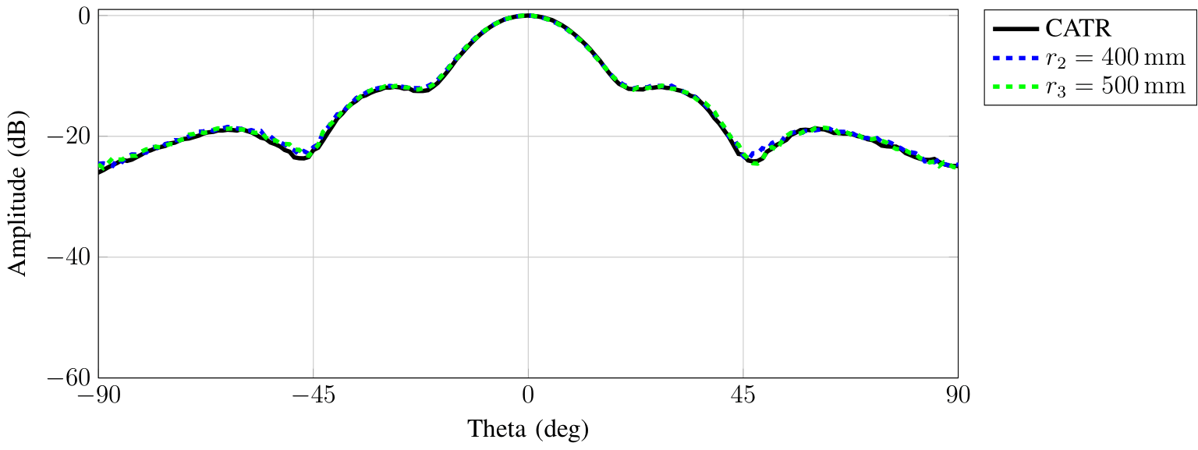
Depending on the dimension of the antenna to be tested and the frequency, direct far-field measurements can also be performed with the robot-based measurement system. The advantage of far-field measurements is that no computationally demanding transformation into the far field is required and the data can be evaluated virtually in real time. However, the larger measurement radius also makes the measurement more sensitive to environmental influences, as can be seen well below. Also in this case, a standard gain horn antenna at a frequency of 60 GHz is considered, but this time by means of a direct far-field measurement. As can be clearly seen, both measurement systems achieve a good agreement; the difference is of the order of only -40 dB. Nevertheless, in areas of low signal levels (|θ| ≈ 45°), the environmental influences of the robot-based measurement system can be observed, since a variation occurs depending on the selected measurement radius and a difference to the measurement in the CATR becomes visible. Since the measurement took place at a time when the assembly of the absorbers had not yet been completed, this variation is mainly due to room scattering effects.
Conclusion
Although work on the robot-based antenna measurement system continues to progress steadily, the comparison shows that already at the current stage of development a good agreement can be achieved with the reference measurements from the IHF's CATR. It can be assumed that even better results can be achieved when the measurement chamber is completed, since the room scattering effects will be further minimized. In addition, the measurement accuracy for near-field measurements can also be further improved by applying a pointwise probe correction, taking into account the actual position and orientation of the probe antenna. Thus, the robot-based measurement system opens up great research potential in the field of antenna measurement technology, for example with regard to compressed sensing or phaseless measurements.
Further Information
The results shown here as examples have been published at relevant international scientific conferences. Further information can be found in the following publications:
| [1] | R. Moch and D. Heberling, "Robot-based antenna and radar measurement system at the RWTH Aachen University," in Proceedings of the 42nd Antenna Measurement Techniques Association (AMTA) Symposium, 2020. |
| [2] | R. Moch, T. M. Gemmer and D. Heberling, "Amplitude and phase uncertainty analysis due to cable flexing in robot-based measurement systems," Proceedings of the 42nd Antenna Measurement Techniques Association (AMTA) Symposium, 2020. |
| [3] | R. Moch, T. M. Gemmer and D. Heberling, "Spherical antenna measurements performed in a robot-based mm-wave test range," Proceedings of the 15th European Conference on Antennas and Propagation (EuCAP), 2021. |
| [4] | R. Moch and D. Heberling, "Pointwise probe correction applied to a robot-based mm-wave antenna test range," in Proceedings of the 43rd Antenna Measurement Techniques Association (AMTA) Symposium, 2021. |
| [5] | J. Jäger, R. Moch, T. M. Gemmer and D. Heberling, "Development of a motion-capable model for a robot-based antenna measurement system to simulate scattering-induced interference," in Proceedings of the 43rd Antenna Measurement Techniques Association (AMTA) Symposium, 2021. |
| [6] | A. C. Granich, R. Moch, D. Heberling, "System parameter analysis of integrated radar sensor in a controlled test environment utilizing a robot-based measurement system," in Proceedings of the 43rd Antenna Measurement Techniques Association (AMTA) Symposium, 2021. |